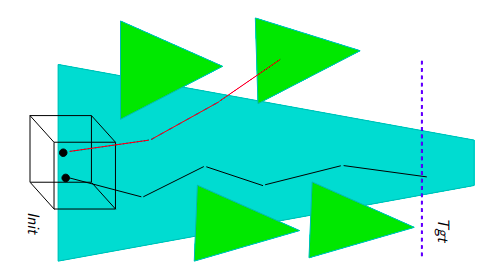
Reasoning about Safety of Camera-Based Autonomous Systems
Verification framework to ensure the safety of camera-based autonomous vehicles

Verification of AI-enabled Cyber-Physical Systems
Our group develops scalable formal methods to verify AI-enabled cyber-physical systems, focusing on control and perception modules that integrate neural networks and learning-based components.
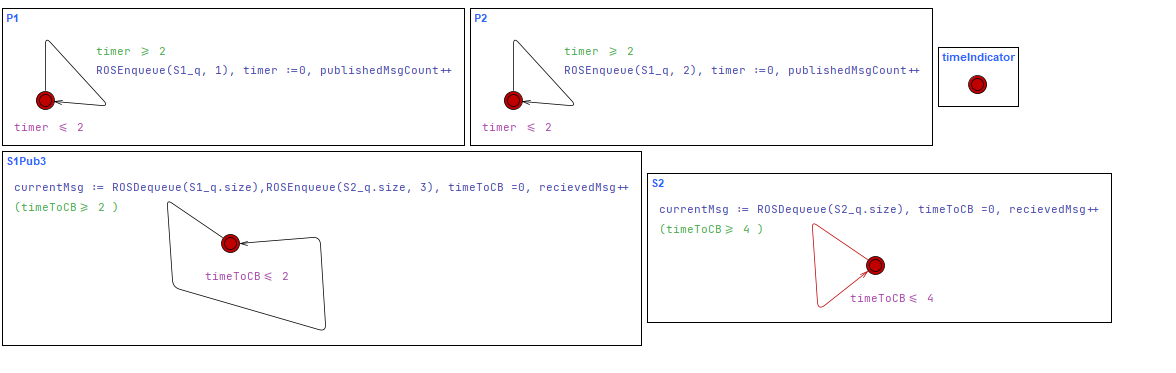
Formal Modeling and Verification of the Pub/Sub in ROS 2
Formal modeling of ROS 2 publisher–subscriber communication using UPPAAL to ensure safety, liveness, and reliable message delivery in robotic systems.