




Notes:
The Real-Time Shape-from- Silhouette Sensor or RTS3
Is the system that I build for this thesis work
It Uses 4 wide angle lens video cameras,
Works on COLOR image data,
And Produces better data than our previous monochrome system
Fast calibration procedures make it Easy to reconfigure
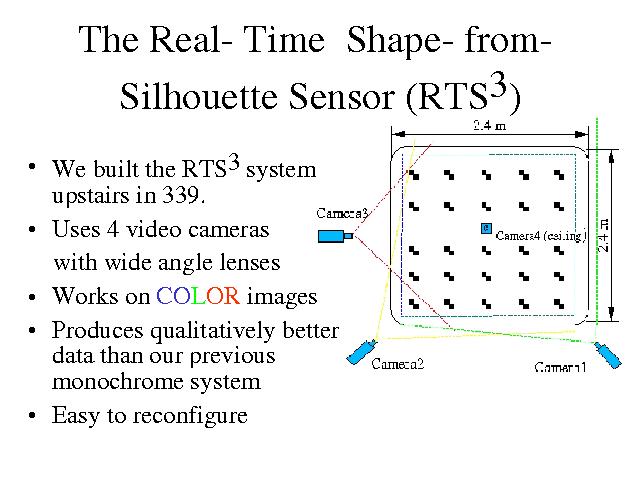
This figure shows a view from above of the camera placement in our lab upstairs.
The small targets on the floor allow us to recalibrate the positions and orientations of the cameras so we can try out different camera geometry.