




Notes:
Click
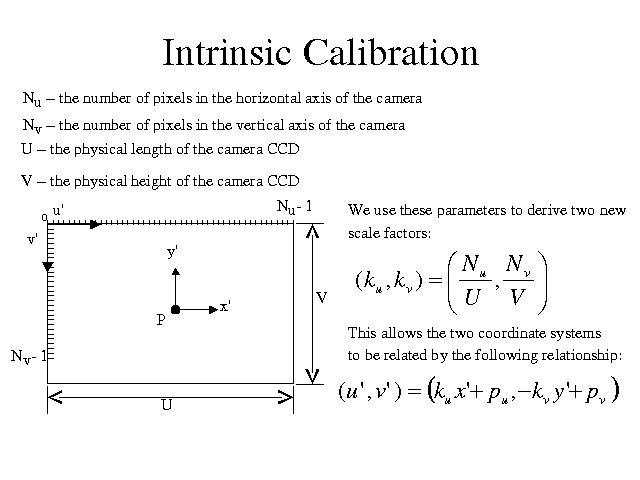
To derive a new offset and scale for the image coordinate system, we need to define the following terms:
Nu, nv, U and V
As shown in this figure, the two coordinate systems, $(x',y')$ and $(u',v')$, are related by a translation and a reflection in one axis.
We need to translate and invert the camera coordinate system, $(x',y')$ so that the origin of the image coordinate system $(u',v')$ is transformed to the upper left corner. The image coordinate system needs to be scaled such that maximum values in the $u$ and $v$ axes correspond to the maximum pixel coordinates that can be accessed in the video framegrabber.
These parameters can be combined into two parameters,
Ku & Kv , which are scale factors which take into account the size of the CCD and the resolution of the framegrabber.
The coordinate P is referred to as the principal point.
We now have enough information to define the projection in terms of the image plane with an origin in the upper left corner,
and maximum coordinate values of Nu and Nv.
We define four parameters to model the projection: