




Notes:
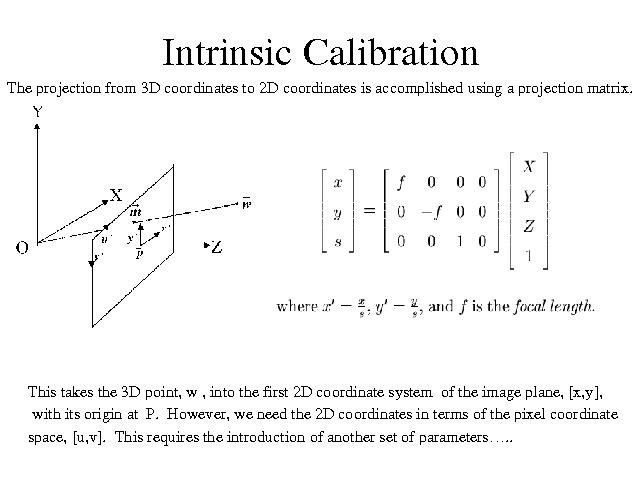
Intrinsic calibration maps 3D points in the cameras coordinate system, such as w,
into the first 2D coordinate system of the image plane, (x’,y’) , with its origin at p, the principal point .
The principal point is the intersection of the optical axis with the image plane.
However, we need the 2D coordinates in terms of the pixel coordinate space (u’,v’).
This requires the introduction of another set of parameters which will allow us to relate these two coordinate systems