




Notes:
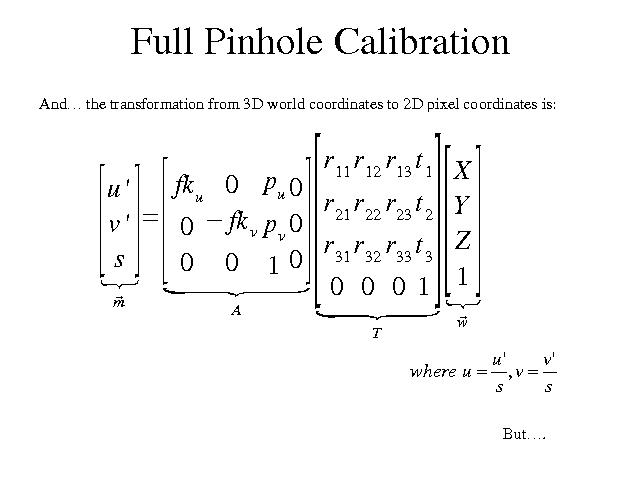
We can now represent the projection of an arbitrary three dimensional point in the world coordinates, w, to a two dimensional point in camera coordinates, m, using the following equation
However, this only models an ideal pinhole camera. Because we use wide angle lenses for our cameras, we also need to account for
RADIAL distortion.