




Notes:
Real cameras often deviate from the pinhole model.
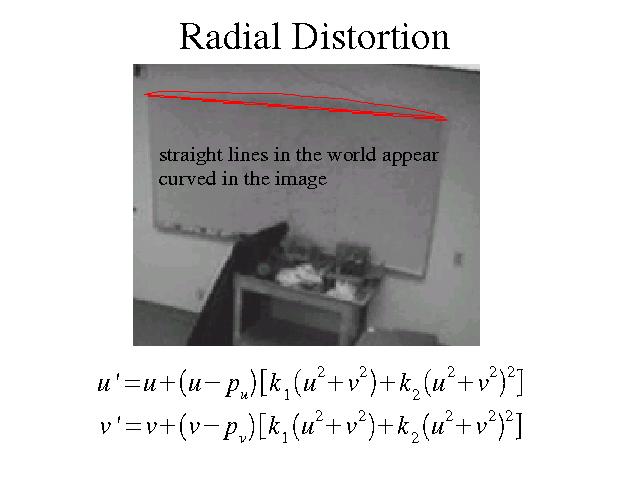
The most significant effect, is radial distortion caused by the lens.
click
This distortion causes straight lines in the world
imaged through lenses to
become curved on the image plane.
Click
However, since each lens element is radially symmetric, and centered on the optical axis,
the center of radial distortion also corresponds to the Principal point P.
So, We can model this distortion with a nonlinear geometric transform where
U-hat , v-hat are the true position of pixel, u,v, in the distorted image.
Pu, Pv, are the center of the radial distortion.
And K1 and K2 are the coefficients of radial distortion